The Shawplateless configuration is an innovative drone project that eliminates traditional landing gear for a streamlined, plateless design.
Advantages include enhanced aerodynamics, reduced weight, increased flight efficiency, and extended operational range.
The absence of landing gear reduces the risk of damage during takeoff and landing, especially in constrained or rugged environments.
Challenges include ensuring structural integrity, developing precise control algorithms and sensor integration, and adapting regulatory frameworks.
Despite challenges, the project aims to revolutionize drone technology with new possibilities through dedicated research and collaboration.
VTP
VTP
The Visual Trajectory Planning project focuses on advancing visual-planning knowledge using Image Analysis and non-conventional Computer Vision techniques.
It implements a feature for recognizing gates and computing suitable drone trajectories using neural networks.
The task is divided into two parts: gate identification with a neural network for distance measurement, and trajectory identification with a second neural network for optimal path planning.
This feature is crucial for ensuring the drone can safely navigate both internal and external environments.
The initial hardware implementation will utilize a DJI Tello drone.
LTS
LTS
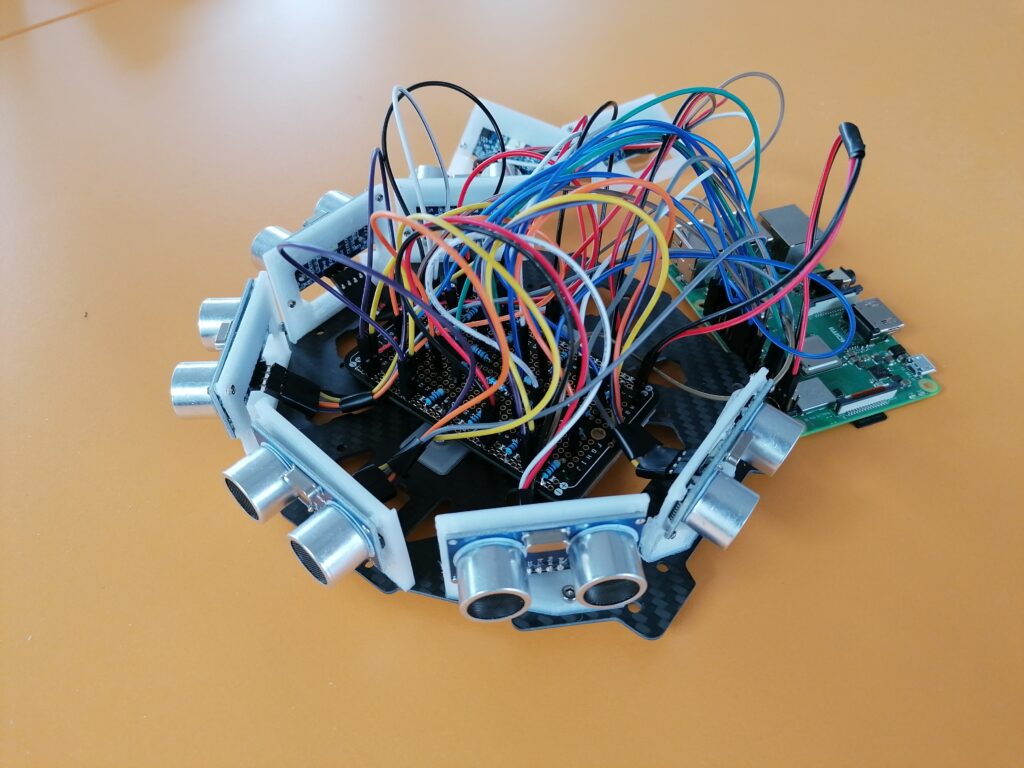
The LTS (Long Term SLAM) project explores various approaches to solve or improve the SLAM (Simultaneous Localization and Mapping) problem.
It addresses multiple issues related to SLAM in both hardware and software fields.
The project involves studying and testing different setups to build a comprehensive database of SLAM-related information.
It aims to develop efficient localization and mapping strategies, focusing on sensor suite choices, sensor fusion algorithms, and advanced techniques like Deep Learning.
All solutions are tested and implemented in hardware to evaluate and compare their effectiveness.
RLBoTs
RLBots
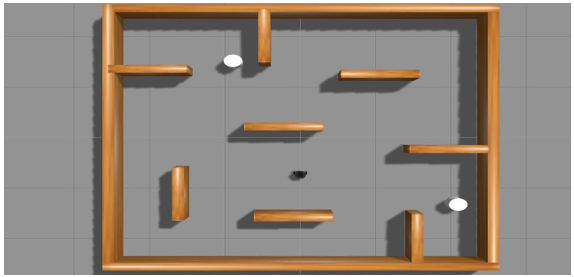
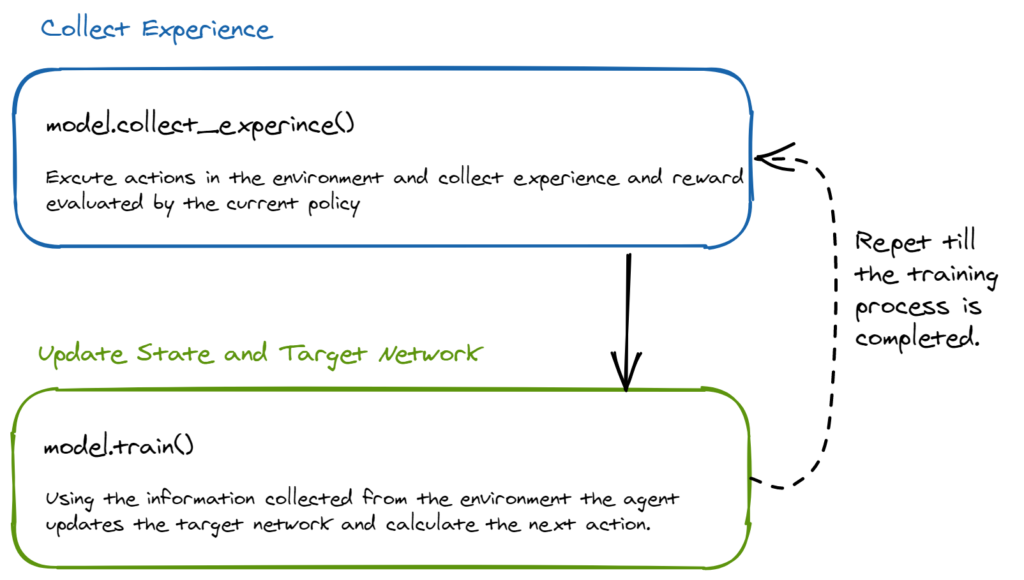
The project develops Reinforcement Learning (RL) algorithms to enhance robot autonomy.
RL focuses on balancing exploration and exploitation without needing labeled input/output pairs.
These algorithms have significant generalization potential due to their learning paradigm.
Modeling the simulation environment and training the algorithms are challenging and active research areas.
The current goal is to develop a Deep RL Agent for obstacle avoidance in unknown environments, progressing towards full autonomous movement and planning.
AMAV
AMAV
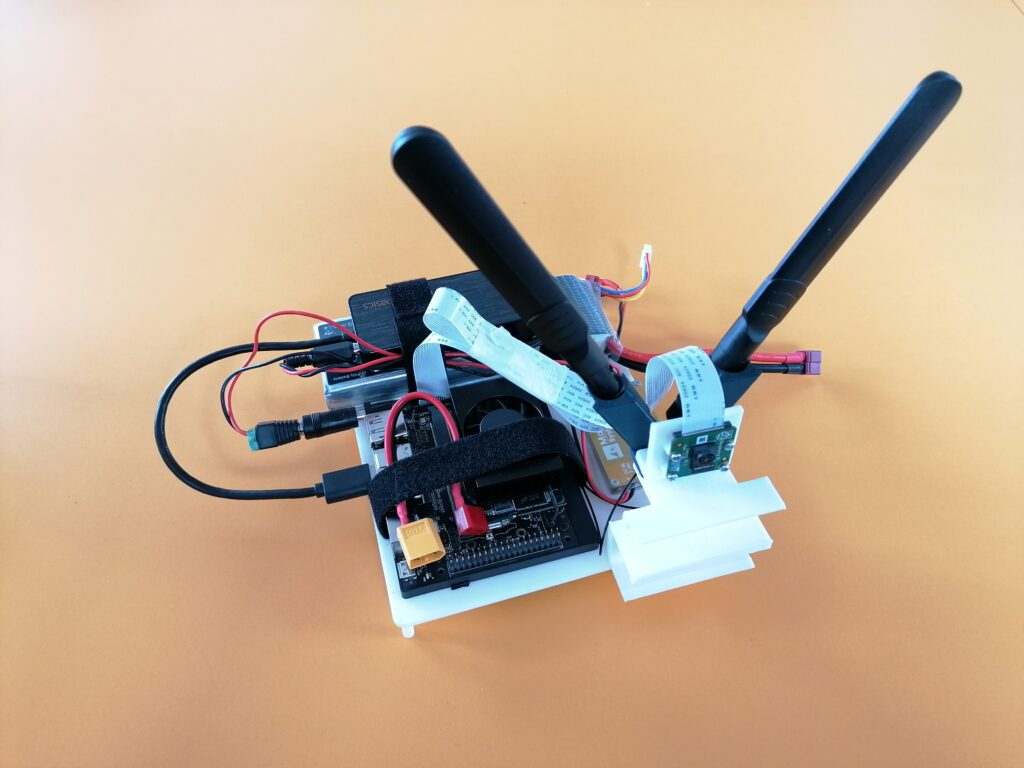
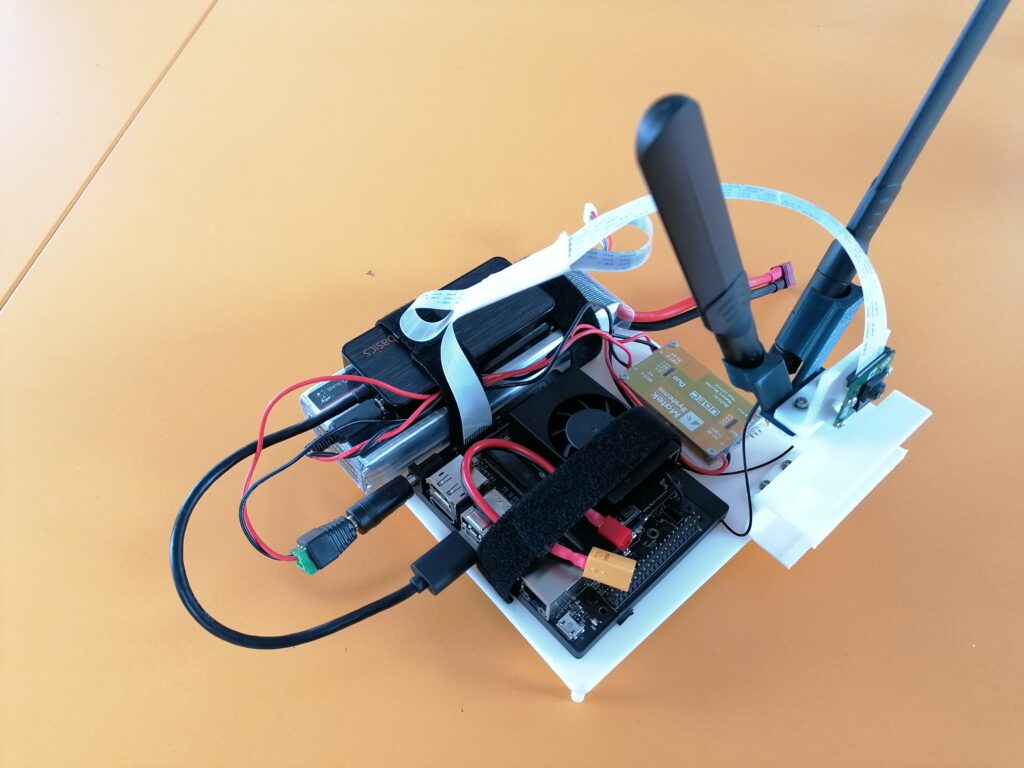
Micro Aerial Vehicles (MAVs) are small UAVs known for their ease of transport, high maneuverability, and flexibility in tight spaces.
Advantages of MAVs include rapid deployment, easy swarm implementation, low-risk of damage, and expendability.
The research focuses on developing MAVs with extended autonomy and flight duration capable of autonomously following an object using deep learning algorithms.
The project aims to achieve full on-board autonomous control, covering sensor data acquisition, processing, decision making, and flight control.
Key technologies investigated include miniaturized high-performance cameras, compact avionics, high specific power supplies, telecom, and actuators.
JARIM
JARIM
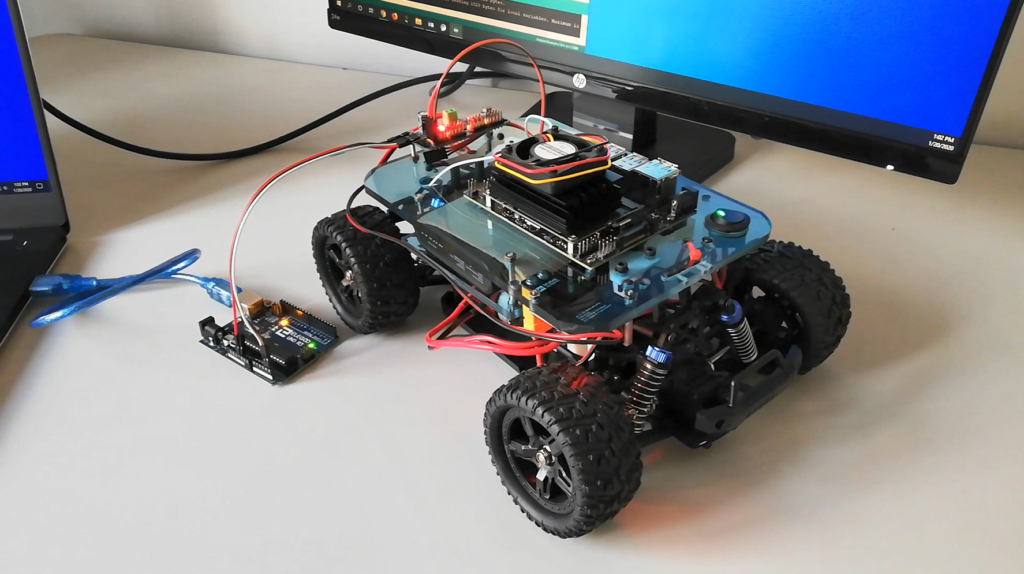
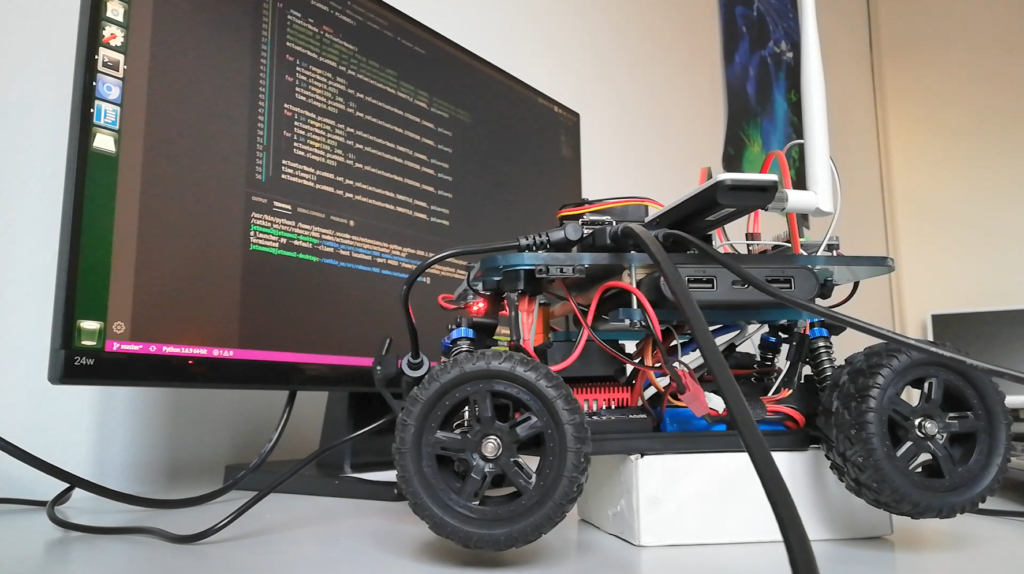
JARIM (Just A Rather Intelligent Machine) is a modified RC car designed to autonomously drive within a circuit using a mono camera for image acquisition.
The car’s decision-making for throttle and steering is handled by a machine learning algorithm, developed via reinforcement learning in a simulated environment.
An image segmentation algorithm was created and trained to label the circuit lines using a dataset of circuit images.
The car’s actuators were modified to be controlled by an onboard computer, and a new electric and power system was integrated.
For safety, both wired and wireless E-stops were implemented, and the Robot Operating System (ROS) was used for managing camera data, decision making, and actuator control.
Cookie policy
This website uses cookies to improve your experience. If you continue your navigation you implicitly opt-in to the cookie usage. We'll assume you're ok with this, but you can opt-out if you wish by clicking the cookie settings button below. Cookie settingsAcceptReject
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.